
Bowed string musical instruments are a family of instruments that produce sound through the vibration of strings, which are set into motion by a bow. The bow, typically made of horsehair stretched between two wooden sticks, is drawn across the strings, causing them to vibrate and produce sound. These instruments are central to many musical genres, particularly in Western classical music, where they are integral to orchestral compositions and chamber music. Beyond the Western tradition, bowed string instruments are also crucial to the music of various cultures worldwide. In India, instruments like the Sarangi, Violin, and Esraj contribute richly to both classical and folk music, while in China, instruments such as the Erhu and Zhonghu play an essential role in traditional and contemporary music. Each of these instruments, with their unique timbres and expressive capabilities, adds depth and emotion to the musical traditions they represent. Naada SoloStrings and Naada EnsembleStrings together provide a complete strings experience to a discerning composer.
Naada SoloStrings is a collection of the following instruments:
- Violin.
- Viola.
- Cello.
- Double Bass.
- Sarangi.
- Erhu.
- Zhonghu.
- Gaohu.
Naada EnsembleStrings is a collection of the following string ensembles:
- Violin.
- Viola.
- Cello.
- DoubleBass.
Articulations
Unlike sample-based models, physically modeled instruments offer superior flexibility in handling a broad range of articulations. Their expressive capabilities allow for the natural and intuitive reproduction of techniques such as staccato, spiccato, tremolo, and more. Additionally, Naada seamlessly integrates explicit support for pizzicato, enhancing the richness and nuance of the performance. MIDI expression and breath messages control the bow velocity, with a stronger attack (e.g., Martelé) resulting from higher velocity.
Samples
Physics
Wave Equation and Digital Waveguides
The propagation of vibrations on the string can be described by the one dimensional wave equation. Here, for simplicity, it is assumed that the vibrations are transverse in nature and happen along only a single plane. d’Alembert found the solution to the general wave equation as the super position of a right-going wave and a left-going wave.
The digital representation of this solution was first introduced in the pioneering work of Julius Smith [1], who showed that a simulation of the wave equation propagation only needs delay lines avoiding the need for an expensive finite-difference time domain (FDTD) implementation [2]. He also coined the term “Digital waveguides” to describe this. The “digitization” of the solution of the wave equation leads to the following equation where the function variables are all integers.
It is often more convenient to simulate velocities instead of the displacement at a spatial location. The representation for velocity propagation is analogous to the displacement equation above.
Waveguide model of a Bowed Instrument
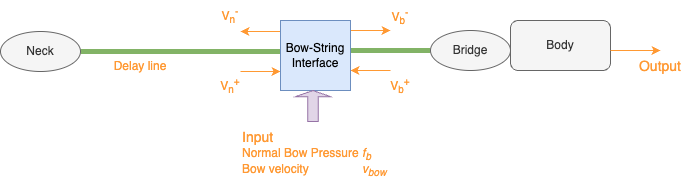
Figure 1: The model of a bowed instrument.
A Bowed instrument can be modeled with a combination of filters, delays and a bow-string interface. The in-coming waves at the interface together sum up to the historical velocity, denoted vh, and can be understood as the velocity of the string at the interface if the bow is instantly lifted of the string.
At every synthesis time point, we would need to compute the outgoing bridge and neck waves. This is easily computed if the velocity of the string v is known at the interface as the sum of the incoming and outgoing waves on each side of the interface should each be equal to v.
The most complex part of the model is to find the string velocity at the interface given input parameters bow pressure and velocity. It is well known that the oscillations of the string happen in a sequence where the bow and string stick together and then the string slips under the bow. This phenomenon was first observed by Helmholtz and therefore this stick-slip pattern is also called Helmholtz oscillation.
The first equation that relates the actual frictional force f and the string velocity is a linear equation [3],
During slip, the frictional force is given by
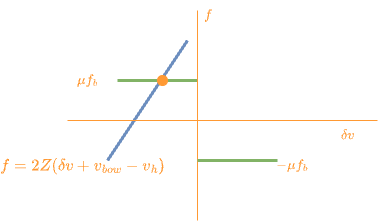
Figure 2: Solving for the relative velocity of the string with respect to the bow velocity. The diagram captures the solution during the phase of slipping.
Additionally during the sticking phase, we need to impose the condition on the frictional force
Accuracy of the model is further improved by considering multiple bow hairs and treating each hair as a spring-dashpot as described in [3]. We found that ignoring the mass of the hair didn’t degrade the accuracy of the solution and made the solving process more efficient. After the string velocity is estimated, the force on the bridge can be estimated to be the product of the impedence of the string and the right travelling wave towards the bridge. This force is then convolved with the impulse response of the bridge and output as the synthesized sample. The measurement and optimization of the impulse response is a topic in itself and we refer the reader to https://ccrma.stanford.edu/~jos/pasp/Bowed_Strings.html.
We would also like to mention that the Sarangi makes significant changes to the model above due to the presence of sympathetic strings. We hope to publish the algorithm soon.
References
- [1] “Physical modeling using digital waveguides” J. O. Smith, Computer Music Journal, vol. 16, pp. 74–91, Winter 1992, special issue: Physical Modeling of Musical Instruments, Part I. http://ccrma.stanford.edu/~jos/pmudw/
- [2] “On the Equivalence of the Digital Waveguide and Finite Difference Time Domain Schemes“, Julius O. Smith. https://doi.org/10.48550/arXiv.physics/0407032
- [3] “Mechanics of the Contact Area Between a Violin Bow and a String”. Part 1, 2 and 3, Pitteroff and Woodhouse, Acustica vol 84 (1998).
- [4] “The tribology of rosin“. J. H. Smith and J. Woodhouse, J. Mech Phys.Solids, 48:1633–1681, 1999.
- [5] “The sound of friction: real-time models, playability and musical applications”, Stefania Serafin, Ph.D thesis.